一般的攝影機只能拍攝2D影像,無法得知物體在畫面中前後的深度。只能加上打光,攝影機角度等技巧, 利用畫面顏色,灰階的明顯差異,找出物體之間的邊緣,進行分析辨識,可想而知這有限的資訊其應用受到很大的限制,同時也增加影像處理,雜訊干擾處理的難度。
以前要做到3D攝影,必須要有2台攝影機,調好固定的距離與角度,經過後台電腦複雜演算法計算,才能求得不是很精準的景深資訊。如今演算法已IC化,有現成精緻量產的3D攝影機,可同時提供一般2D影像及景深資訊,價格便宜,終於開啟了3D攝影機廣泛的應用。
本公司所開發的智能邊緣運算控制器iEdge4,具備4核心ARM的強大運算能量,可連接2~4台USB 3D Cam,同時具備各種無線通訊選項及I/O介面,可以協助客戶解決以前無法解決的影像應用。
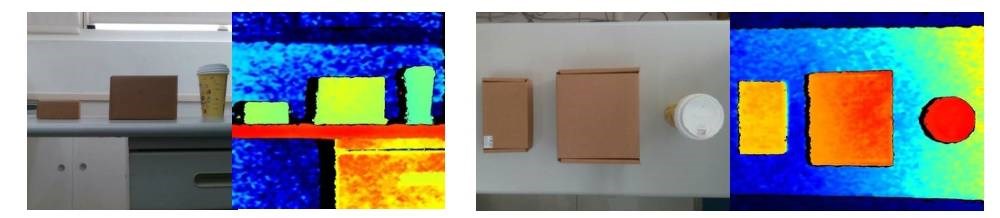
以上3D圖形,是將景深與顏色建立一個對照表,不同景深範圍以不同顏色表示,至於實際的景深精確度得視採用3D Cam的規格及景深距離而定。

USB 3D Cam

| USB LiDAR Cam Specification |
| Use Environment |
Indoor |
| Image Sensor Technology |
Laser Scanning |
| Ideal Range |
0.25 m to 9 m (Range affected by reflectivity) |
| Depth Technology |
LiDAR |
| Depth Accuracy |
~5 mm to ~14 mm thru 9 m |
| Depth FOV (H × V) |
70° × 55° |
| Depth Resolution |
Up to 1024 × 768 |
| RGB Frame Resolution |
1920 × 1080 |
| RGB Frame Rate |
30 fps |
| RGB Sensor Technology |
Rolling Shutter |
| Dimensions (Diameter × H) |
61 mm × 26 mm |
| Connectors |
USB C 3.1 Gen 1 |
| USB 3D Cam Specification |
| Use Environment |
Indoor/Outdoor |
| Image Sensor Technology |
Rolling Shutter, 1.4μm × 1.4μm pixel size |
| Ideal Range |
0.5 m to 6 m |
| Depth Technology |
Active IR Stereo |
| Depth Accuracy |
<2% at 2 m |
| Depth Field of View (FOV) |
64° × 41° |
| Depth Resolution |
Up to 1280 × 720 |
| RGB Frame Resolution |
1920 × 1080 |
| RGB Frame Rate |
30 fps |
| RGB Sensor Technology |
Rolling Shutter |
| Camera Dimension (Length × Depth × Height) |
99 mm × 20 mm × 23 mm (LxDxH) |
| Connectors |
USB-C 3.1 Gen 1 |

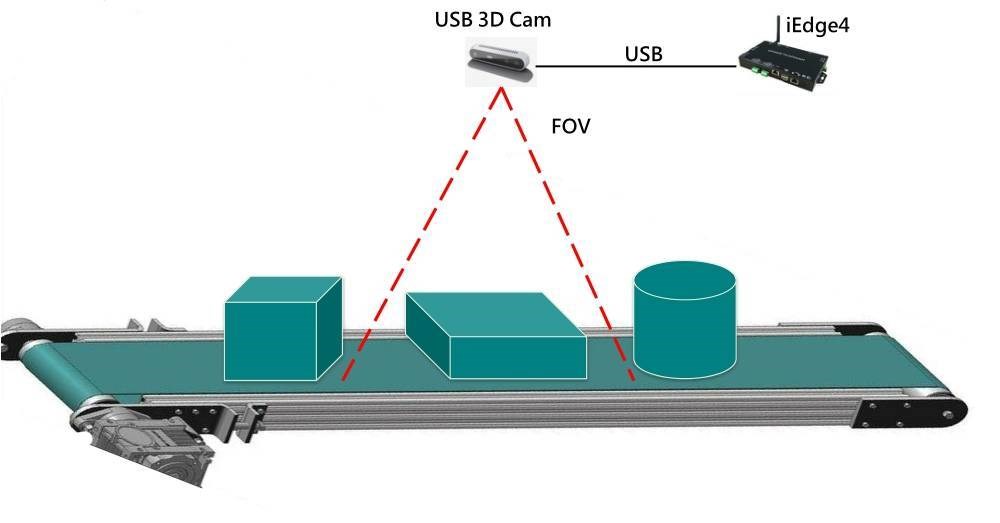
利用3D Cam 可以量測物體的景深即使物體與輸送帶顏色一樣也能從3D資訊得到它的形體,加上輸送帶已知之景深,可以知道物品的高度剖面積,即使是不規格的物品,也可計算它的體積,同時只要物品前後分離,也可以同時計算其通過的數量。
只要一支USB 3D Cam加上一台智能邊緣運算控制器iEdge4,即可算出物品體積及數量。

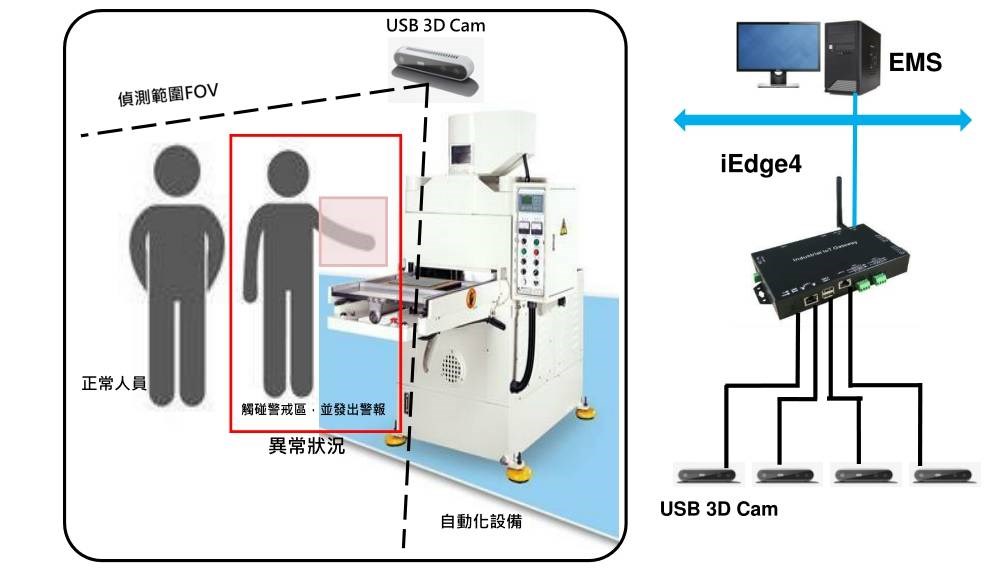
一般攝影機是2D影像,很難分辨出前後物體距離。採用3D Cam因為有精深資訊,可以精確的偵測人的四肢或軀幹靠近危險區域立即示警,不會產生漏報或是誤報情況

3D Cam 置於天花板頂端,由上往下照得到人的景深資訊,可以不受陽光照射產生的陰影,或地板反光,或者手提行李、推車等影響,而精確計算進出人數,精確度可達到95%以上。


電動堆高機運行聲音很小,堆高機上堆有物品,駕駛也不易察覺前方狀況,因此在岔路口容易發生意外。採用3D Cam可以有效偵測堆高機靠近,不易造成(誤判或漏測),發出警示,提醒轉角人員注意。
USB 3D Cam連接一台智能邊緣運算控制器iEdge4,再加上一警報器,在現場即可安裝獨立運作,比用IP Cam加電腦影像辨識人或車來得有效且更低成本。


推高機搬運棧板時需要讀取棧板或承載物品上的條碼。但是叉架叉入是一個移動的過程,由遠而近很難控制讀取條碼的鏡頭焦距,該在何時有清晰畫面,做正確的條碼讀取。
採用3D Cam可以即時測量與棧板物品距離,到適當距離時取2D影像進行條碼辨識。可以取得正確的條碼資訊。
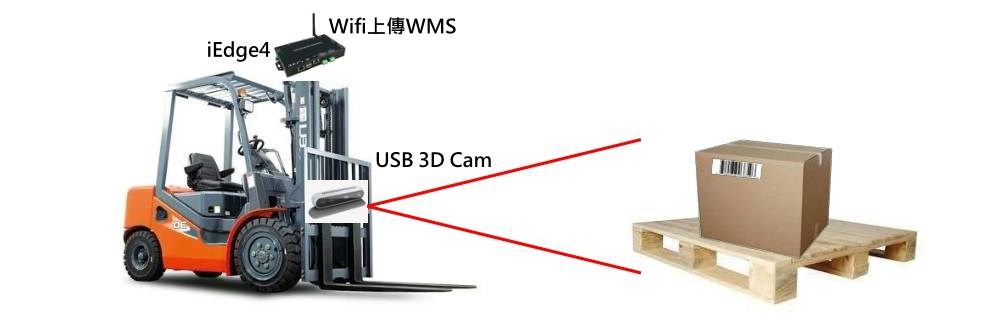
進入焦距最佳的距離,啟動2D影像抓取辨識。